Joystick et Radio Commande
- Le joystick et son but - 
- Cette solution de pilotage doit ouvrir la porte de l' accessibilité au char à voile à une plus large catégorie de personne afin d'éviter l'isolement.
- deux types de commandes :
- a/ le pilote est autonome avec les commandes.
- b/ Le pilote est sous contrôle du moniteur qui a distance peut prendre la main sur les commandes
à L' aide de son joystick administrateur.
- Etude à réaliser -
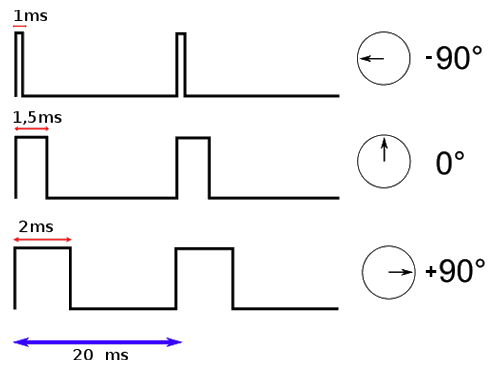
- Relier un joystick à un circuit émetteur du type à "trains d'impulsions" sur une fréquence 2,4ghz de type codé (*pcm ou autre). * pitch code modulation
- La puissance de l'émetteur doit être limitée à 100mw. la norme à respecter doit correspondre exactement aux textes de l' anfr &
arcp - http://www.anfr.fr/accueil/ - http://www.arcep.fr/index.php?id=11688
- Le récepteur radio, sera conçu en fonction de son émetteur hf et lui aussi correspondra en tous points aux textes émis par les
administrations françaises.
- LE SERVO MOTEUR -
1/ Première option. Etude en cours.
- Utilisation d'un moteur pas à pas (type bipolaire 4 fils et de sa platine).
ex: animation d'un moteur pas à pas
2/ Servos treuil asservi à un récepteur hf.

- Etude à venir pour comparaison et analyse.
- Les servos moteurs ou servos treuils - calculs en fonction du besoin en puissance et de la tension de l' accumulateur .
- Pour l' accumulateur une orientation sur du matériel lithium....peut être envisagée.
- toutes ces données ne le sont qu' à titre indicatif.
- Un ensemble tx,rx existant dans le monde du radio-modélisme peut être adapté. Une modification du récepteur permettant
l'utilisation d'intensité plus importante doit être alors réalisée.
Cette option sera mise à l'étude de la section recherche.
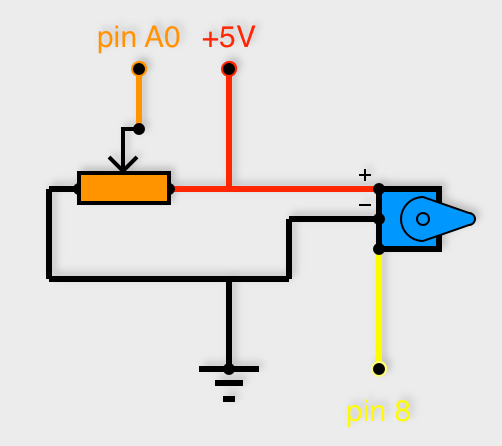
UN MODELE DE MODULE ARDUINO;
Date de dernière mise à jour : 23/11/2017


